CUVIS-joint Surgical System
CUVIS-joint is a cutting-edge surgical robot system that improves the completion of artificial joint surgery with optimal surgical planning and precise cutting.
With Optimal tracking sensors and self-developed surgical planning CUVIS-joint helps patients that are in need of artificial knee surgery.

Since 2006, CUREXO the medical robot company has been steadily growing with continuous R&D and endless challenges. CUREXO management philosophy is contribute to human society by providing differentiated medical products and solutions based on advanced technology.
Why Robotic Artificial Joint Surgery?


Personalized pre-planning.
As each person has a different face, the shape of bone is also different. CUREXO’s artificial joint surgical robot shows the patient’s bone in 3D images, and the doctor can use those images for pre-planning of surgery personalized for the patient.
Pre-selection of artificial joint and precise insertion of artificial joint.
What’s as important as the precise surgical plan is to select and insert the personalized artificial joint. The doctor uses the robot to select the artificial joint for the patient and insert it accurately.
Precise cutting for submillimeter dimensional accuracy and optimum alignment.
Precise cutting serves the optimum result.
CUREXO’s robotic artificial joint surgery system provides the correct alignment of a patient’s leg axis with the submillimeter dimensional accuracy and precise cutting for the optimal surgical outcome.
Reduction of side effect and reoperation.
CUREXO’s robotic artificial joint surgery reduces such side effects as inequality of limb length, pulmonary embolism, and fracture. The risk of infection is also reduced by using fewer instruments than in conventional surgery.
CUVIS-joint Surgical System Product Composition
Surgical plan.
Only the bone parts are excerpted in the CT image and is showed in 3D which makes the preoperative bone state of patients making accurate pre-planning possible.
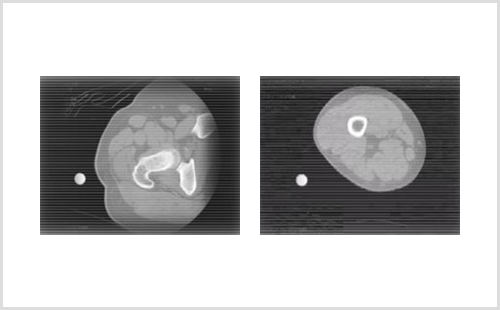
CT images of patients
Surgical Planning Setup

Various cutting options.
Full Surface Resection method where doctors would proceed as pre-planned and after the bone cutting is finalized, checking the Gap check for the soft tissue balance.
The Extension Surface Resection method checks the soft tissue balance during surgery, micro-adjusting the implant’s location, then correcting the surgical plan and proceeding with the cutting of the bone.
(Photo: Select Resection Strategy)
Gap check & Intra-Op surgical planning change.
Gap check is made to determine the direction of the operation and to confirm the results of the procedure.
After Gap Check, the surgical plan can be changed according to a doctor’s decision.

Gap confirmation screen Demo 1
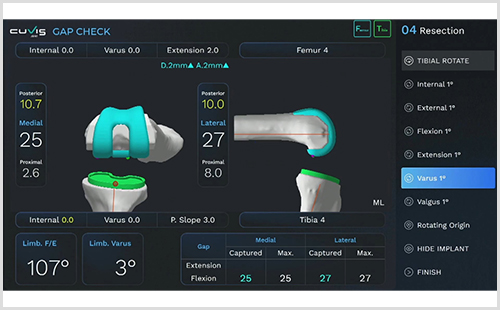
Gap confirmation screen Demo 2
Real-time system monitoring & Restoration.

Bone Movement Monitoring

Robot Marker Restoration
CUVIS-joint Surgical System Process

STEP 1
Patients can decide upon robotic artificial joint surgery after consulting the doctor.
Step 2
CT scanning.

Step 3
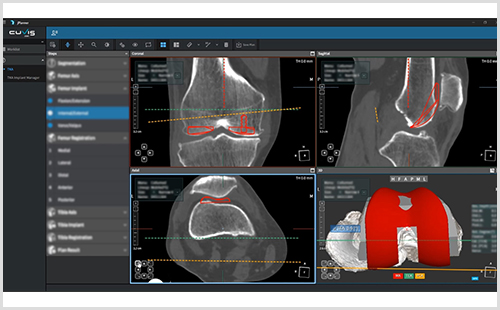
The scanned CT image is converted into a 3D image in ORTHODOC, TPLAN.
The doctor diagnoses the patient’s condition and makes a surgical plan using the converted image.
Step 4
The patient is connected to the robot and fixed to keep still for surgery. If the patient and the robot are connected, the doctor performs the registration process to verify if the 3D image of the patient matches the original surgery site of the patient.
When the registration is completed, the robot reviews the data finally and cuts the bone precisely in the size, position, angle, and direction of the implant decided in the surgical planning state.

Step 5
Insert and fix the implant decided and finished the surgery.